New 20.21W firmware for WD-20 introducing revolutionary safety features to your operation. Including improvements to slewing speed and wireless performance etc.
For upgrading to new features, please refer to firmware flashing guide link. Any questions during upgrading please contact our support team.
Mounts produced after Sep 2025 have been equipped with latest 20.21W as factory default.
New features
1. New Safety Feature - Encoder based HA Limit(EC Guard)
Adjustable HA(Hour Angle) Limit for collision prevention, reliable even coordinates wrong synced.
Tracking/Guiding/Slewing motion stopped when reaching limits at west/east.
2. New Safety Feature - Autonomous Emergency Braking(AEB)
Monitoring collision for both axis, emergency stop the motion and reversing during a collision happened
For mitigating potential damages during a collision
Adjustable aggressiveness for compatible with variety of loads
3. Adjustable Motor Parameters
Adjustable preset PID levels of motors
4. Wireless Mode Switching for BT/WIFI 5. GPS Mode Control
Improvements
Slewing speed improved from 2.8dps(Max) to 5 dps (Standard)/10dps(Max)
WIFI connection stability improved for Windows & Android.
Motor monitoring optimization
dps = degrees per second
For more, please refer to feature introduction and guide below.
New Safety Feature - Encoder based HA Limit(EC Guard)
Category: Safety & Limits
Function Introduction
Encoder based HA Limit(called as “EC Guard”) designed to monitoring motion of RA axis during tracking/slewing/guiding. It’s a adjustable limit that stop the motion of mount once limit reached.
Advantages
Different from other most frequently used software limits in mount. Traditional software limits rely on correct coordinates system of mount. While coordinates could be wrong set/synced during alignment/polar alignment/plate solving, which may lead to failure of protection and result in possible collisions.
New Encoder base HA Limits introduced to WD-20, will be achieved by Encoder of our Direct Drive. It can works reliable even mount’s coordinates & software meridian limits failed.
User can customized values of limits, to let the limits compatible with structure of the OTA, for avoiding collision to tripod or other objects near the mount.
Parameters
Max (East pier side) - East degrees to meridian (range 0-180, factory default = 95)
Min (West pier side) - West degrees to meridian (range 0-180, factory default = 95)
Notice & Caution
User need to consider both Meridian limits and EC Guard limits values, if EC Guard values less than meridian(triggered before reaching Meridian West/East limits), Meridian flip may not be able to work.
EC Guard will be initiating once mount powered on, or a Return Home completed.
Due to the deceleration process, the mount may continue to rotate a few degrees beyond the set limits when triggered. The extra rotation depends on the slewing speed selected.
Homing aborted(AEB triggered or aborted by user) before completion may result wrong zero point of EC Guard. Please do Return Homing again and make sure it completed if aborted.
How it works
EC Guard enabled once mount powered on.
Homing REQUIRED for initiating EC Guard.(Not required if mount already At Home at start).
When RA motion reach the Max/Min of EC Guard. RA motion will be stopped. Only manual guiding for reversing & Homing allowed.
Guide and Practice
EC Guard values can be adjusted via Mount PC Tool. Download Link
EC Guard limits have higher priority than Meridian Limits. Meridian limits normally should be reached first than EC Guard limits.
EC Guard could be considered as final protection once Meridian Limits may failed due to wrong coordinates. Set the limits value just after Meridian Limits, before OTA reaching the tripod.
New Safety Feature - Autonomous Emergency Braking(AEB)
Category: Safety & Limits
Function Introduction
Autonomous Emergency Braking function is designed to mitigate damages in potential collision happened during mount operations. Mount will monitoring motion and abnormal torque in Tracking/Guiding/Slewing, to STOP the motion of mount immediately if possible collision detected, with a following reverse on that axis. To reduce damages to OTA and equipment as far as it can.
Advantages
Based on WARPDRIVE unique Servo Direct Drive, our motors will be able to detect collision happened/abnormal torque increased during mount operation. AEB will not be impact by failure of mount’s coordinate system, improving safety of your operation.
Adjustable parameters of AEB provided to user. User can customized aggressiveness of AEB threshold, for adjusting sensitive of AEB triggered to comply with slewing speed/weight of their load.
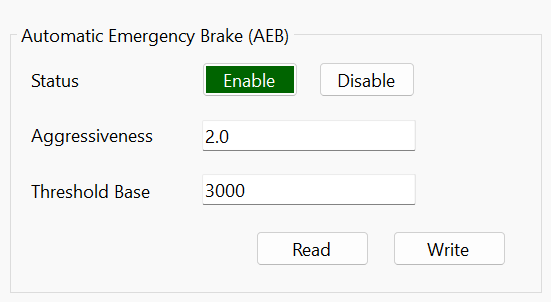
Parameters
Aggressiveness - 1.0(default) to 10.0, format X.X
Threshold Base - 3000(default)
Notice & Caution
AEB designed for MITIGATION of damages in potential collision. NOT like EC Guard which can prevent collision happened. Damage could still happened to your equipment as collision already happened when detected.
Sensitive of AEB to detect a collision will be decided by parameters, and conditions of materials caused collision. Soft materials like cables may not be able detected in time/missed.
AEB may interrupt normal slewing due to low threshold and aggressiveness been set that caused high sensitive and unintended triggered. User may need to set larger Aggressiveness value(less sensitive) based on slewing speed and load weight.
How it Works
AEB will mainly detect abnormal torque and other factors, during tracking/guiding/slewing.
When conditions meet the threshold, mount will perform an immediate ABORT of motion with following a 5 degrees REVERSE on that axis.
Sensitiveness for triggering a AEB braking/reversing has direct ratio with parameters Aggressiveness and Threshold Base
Factory default values may be too sensitive for larger OTAs and fastest slewing speed(5~10dps), which means user may found mount motion aborted or oscillation during slewing. In these cases, user need to adjust AEB parameters for ensuring normal operation will not be impacted.
Increase value of Aggressiveness to make AEB less sensitive to be triggered. Try larger values such as 2.0 ~ 10.0. For example, a 10kg OTA may require at least 2.0~3.0 for avoiding AEB triggered too sensitive.
Considering slewing speed factor of slewing during AEB tuning, you may need to test if current Aggressiveness is workable or not for fastest slewing like Max speed set to 10dps.
For Threshold Base it’s not recommended for modification, as designed for auto tunning feature released in future.
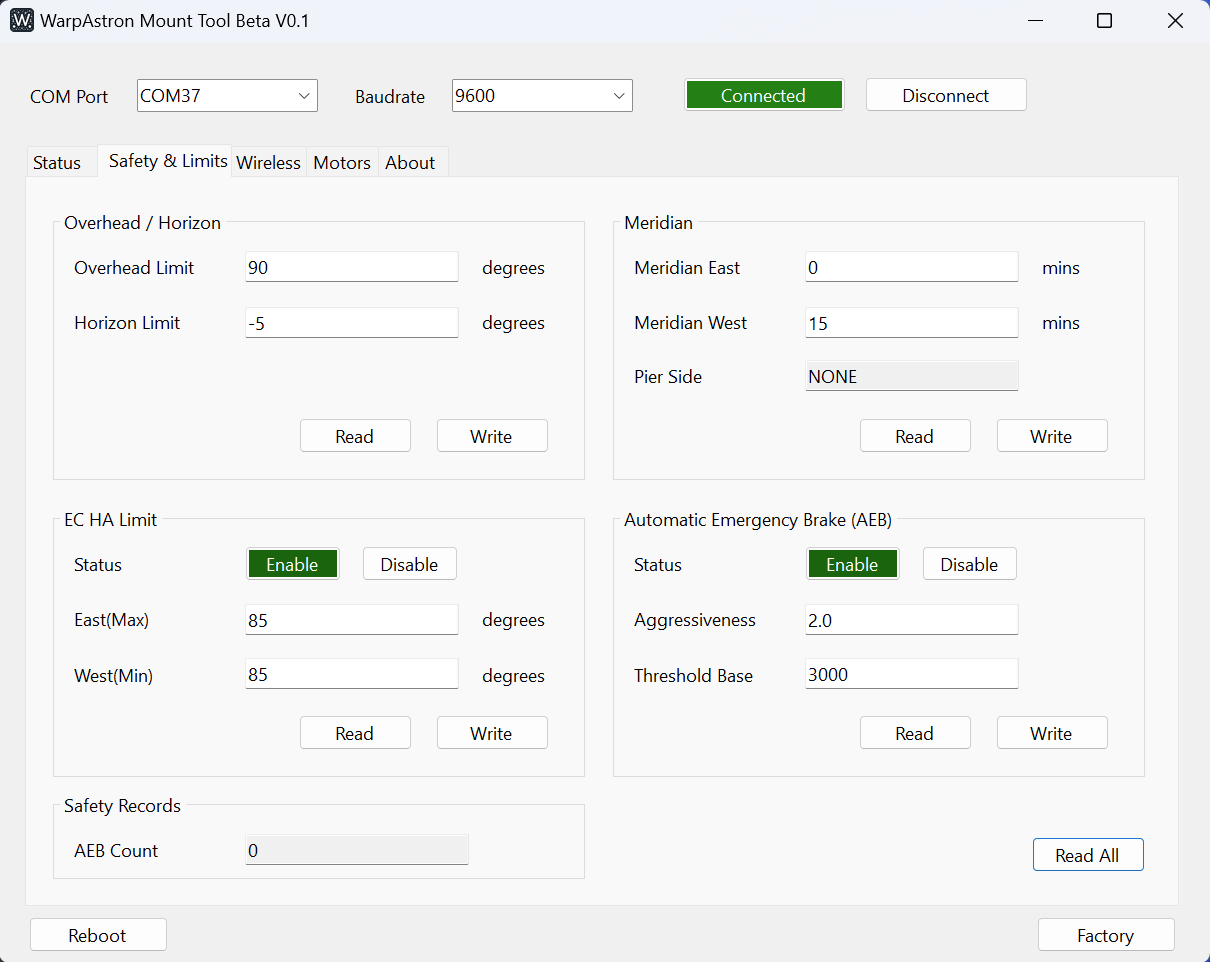
Steps for adjustment
Open the Mount PC Tool.
Select COM port and Connect.
Go to Tab - Safety & Limits
Click button “Read”.
Change values in textbox.
Click button “Write” for save the modification.
Click button “Reboot” for taking effect.
AEB Tuning
Factors to trigger an AEB easier
Aggressiveness(AEB parameter) - Increase value for less sensitive, decrease value for more sensitive
Threshold Base(AEB parameter) - Increase value for less sensitive, decrease value for more sensitive
Collision Objects - Soft or easily deformed objects in collision maybe difficult to trigger AEB, like cables
Slewing Speed - Faster speed may easily trigger AEB, especially mount at Fastest 10dps slewing
Weight/Torque of OTA - Larger weight/torque of telescope could trigger an AEB much easily than small one.
Pointing Positions - OTA in positions when slewing back from downside to meridian (slewing against gravity)
Temperature - Low temperature operations may demand more torque output from motor.
Recommended Tuning Process
For set AEB parameters to comply with your OTA and operations to avoid an unintended braking & reversing, and also with more sensitiveness to trigger AEB to protect your property in a real collision, as early as it can. Above factors to trigger an AEB need to be considered during tuning process.
Enable / Disable AEB
User can choose to enable or disable AEB function based on demands. If user not ready for tuning a AEB and to avoid unintended trigger of AEB. User can disable AEB in settings.
Consider Max Slew Speed Required
WD-20 can reach up to 10 dps (degrees per second) on new firmware. Faster speed could more easily to trigger an AEB, which required larger threshold for faster speed than slower.
If user do not need fastest speed for operation. Slewing (Guide) speed Max recommended to set lower value. such as 5 dps.
For changing slewing speed Max via hand controller, maximum speed can be configured at Settings->Configuration->Goto Speed. Fastest = 10dps Max, Normal = 5 dps Max. (To select current slewing speed, use button F1/F2 for adjusting)
Testing Mount in Different Position
Return mount to home at first. Then set the Guide/Slewing speed to Max (5dps/10dps)
Manual slew the mount to position that 90 degrees at west/east on RA axis, or slew the mount pointing to meridian (at least 10degrees safety distance between your OTA and tripod in case reversing caused collision)
Perform a homing via Return Home on hand controller or press home button on mount.
Observing if a AEB triggered - Mount braking and reverse happened.
Increase Aggressiveness value in PC Tool, if an AEB happened in testing. Try increase 1.0 every times, then testing again.
Tuning the value until it won’t unintended triggered.
Check AEB Count Records
AEB Count record can be checked via Mount PC Tool. It will show history record of AEB triggered.
If you found AEB Count has large number results or increased while actually no collision happened. It may cause due an unintended triggered. Current Aggressiveness value maybe too low for your operation.
With new 20.21W firmware, wireless mode of the mount can be switched to WIFI AP or Bluetooth mode as runtime, no need for requiring flashing firmware to switch the modes anymore.
Note: WIFI or BT can’t be working at the same time.
Parameters
Wireless mode - WIFI/BT/OFF (WIFI as factory default)
Notice & Caution
BT mode supports Windows/Mac/Linux/Android.
BT mode not supported by IOS.(IOS can’t supposed classic BT mode).
Use Baud rate 9600 for BT connection.
Wireless availability may be different due to region/area policy.
Guide and Practice
Wireless mode can be switched via Mount PC Tool. Download Link
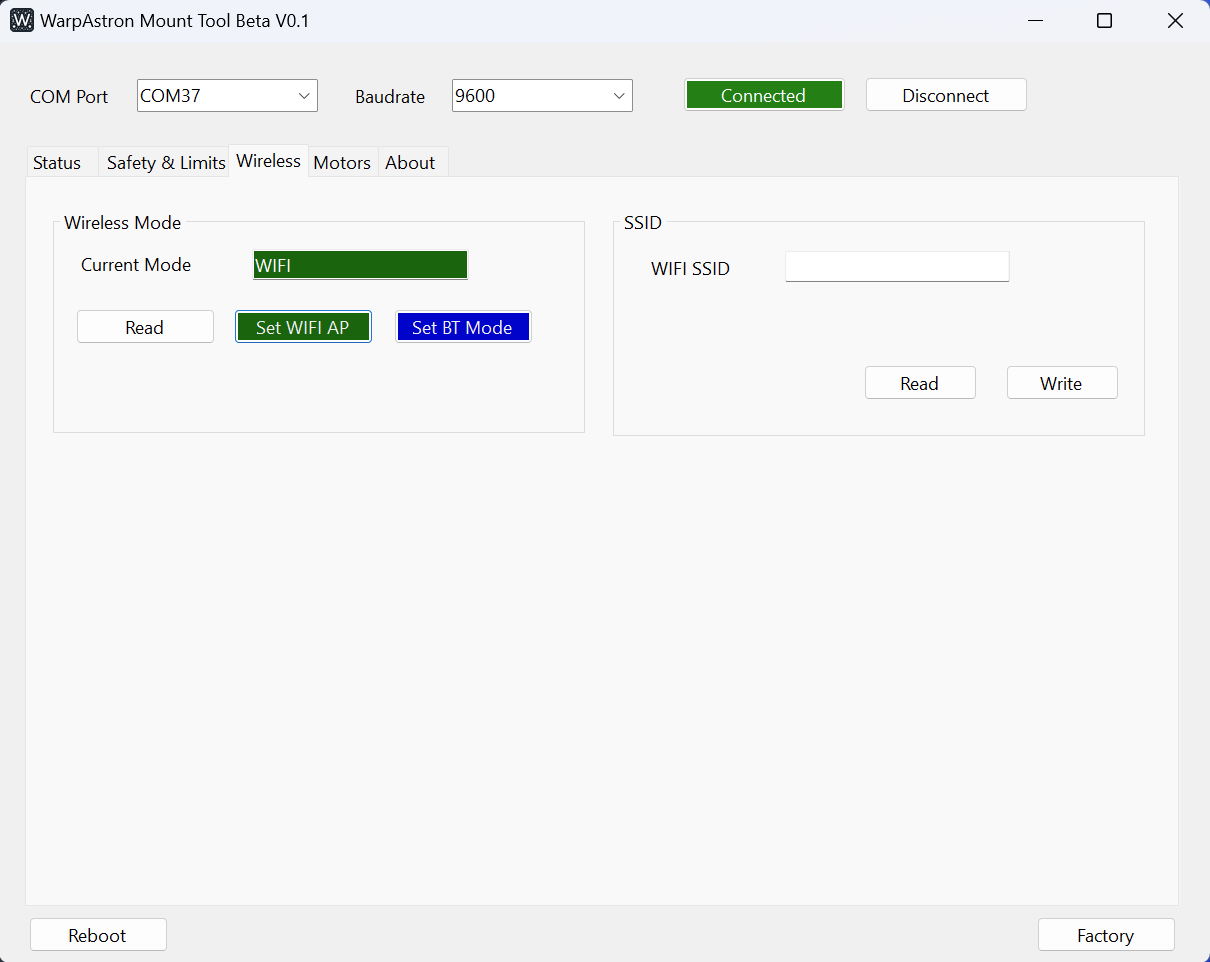
Steps for adjustment
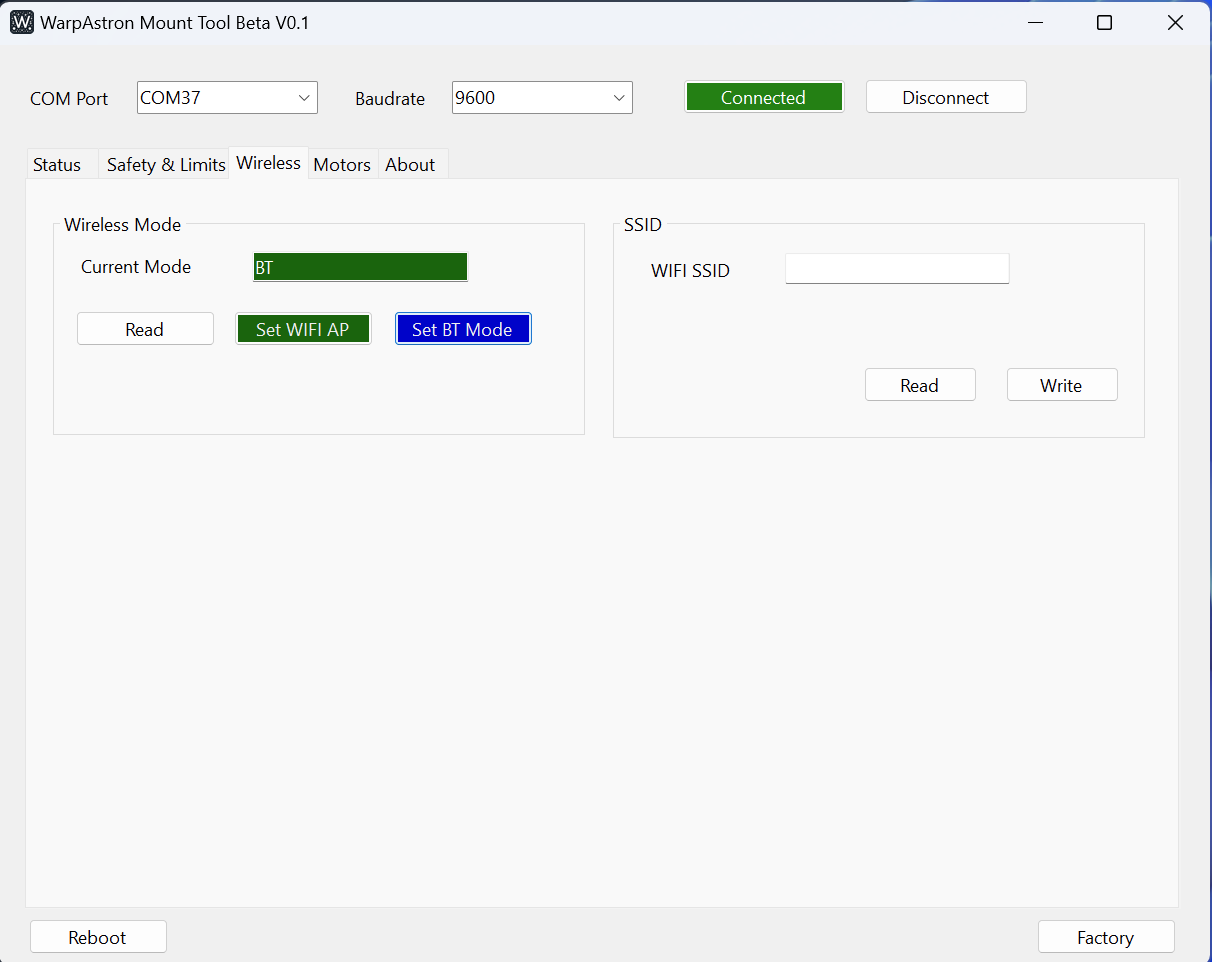
Open the Mount PC Tool.
Select COM port and Connect.
Go to Tab - Wireless
Click button “Read” for current mode.
Click button “Set WIFI AP” for switching to WIFI mode.
Click button “Set BT” for switching to Bluetooth mode.