As said, theory not always matches practice. I observed a dead-center Jupiter in the smalles possible ROI in FC for about an hour, not that high in DEC. As an evidence, I do have gigabites of SER files showing this behavior. I had never observed that before, and will probably never achive this again. Without PHD guiding, I would have to execute many manual corrections with the hand controller between the individual R,G, and B channel recordings to keep a planet in the ROI. In my rare situation, there was no need to manual correct, but perfect guiding. As I have written extensively already, I do have no light frames to inspect in PI, since I did planetary imaging on that particular evening. Whatever this is unbelievable or not, it is what I observed, and these are facts, which is supported by the SER files I do have, whatever this may be theoretically substantiated or not. I know very well how to handle PHD logging, but, honestly speaking, it’s all about what we observe, and what’s practical. I don’t worry about what is theoretically impossible if everything works well while there are rare favorable circumstances that I can take full advantage of.
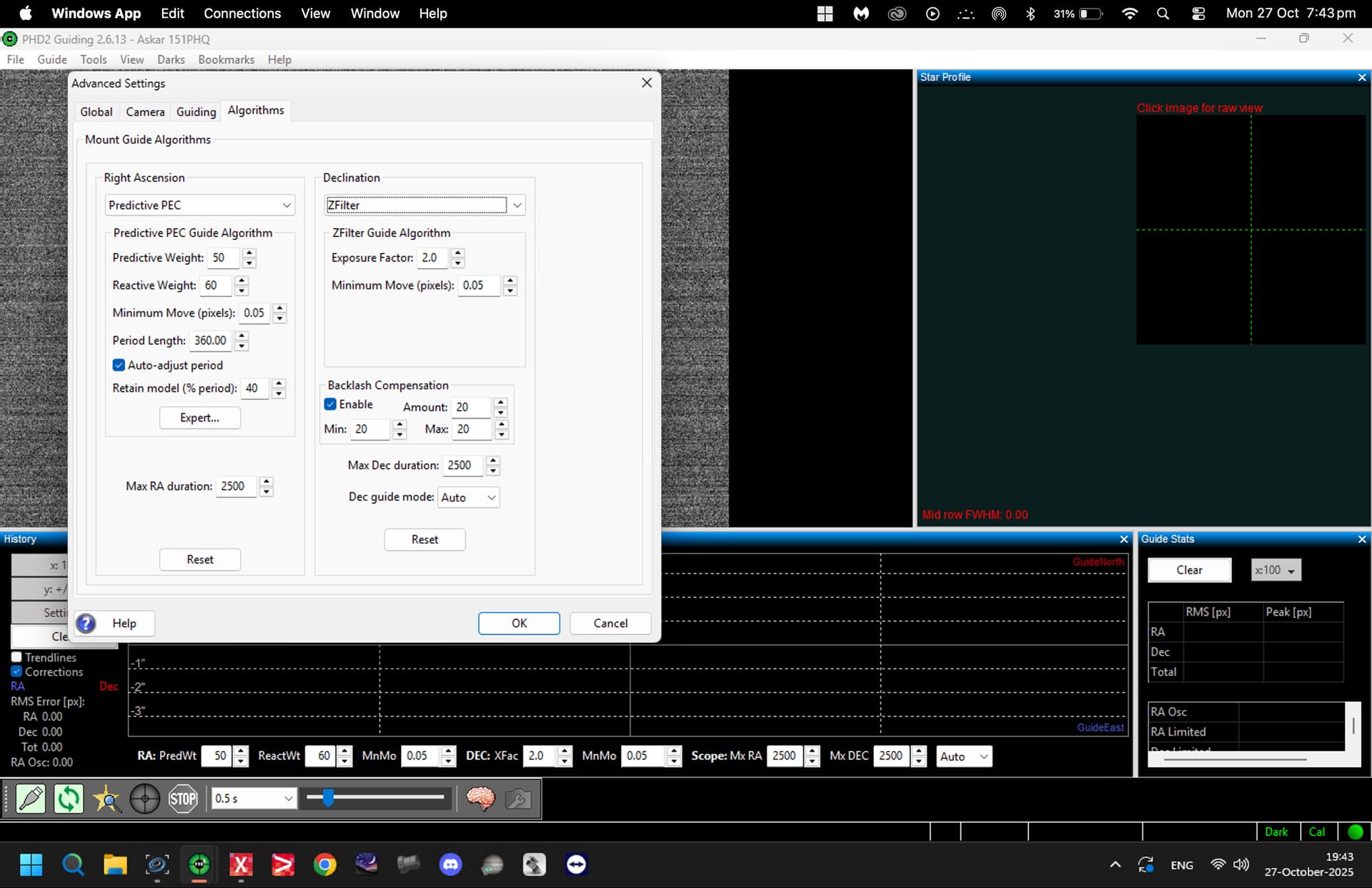
Hey Buzz, I recently purchased a WD-20. There is an Askar 151PHQ scope and Eagle5s mounted on it. Also along for the ride is an OGA (174mm) and 2600mcp and a Senso Sesto 2 all weighing 15.7kg. I am about to implement your recommendations for setup on PHD2. Does this look right? Can’t seem to find where the 75/75 aggression goes. Can you help, please?
Cheers, Peter
As @Wildetelescope and @buzz mentioned some time ago (and sorry to resurrect this), there is indeed some overhead in the guiding methods that phd2, ekos etc use. This, in my opinion and from what I could test, comes mostly from the use of still images for guiding. In touptek cameras, this is the SOFT_TRIGGER mode, and it implies some negotiation at SDK level that makes it almost impossible to guide faster than ~1s unless you are using USB3 and a very fast machine.
If you check out the implementation in asiair mini, you can easily see that their system is capable of guiding at framerates of ~7-8 despite being a terribly slow ARM SOC (slower than a PI4) and having only USB2. My bet is they use video feed mode for guiding.
Now, I have no clue why phd2 uses still mode for guiding instead of a video stream, when it creates very high latencies. Probably to avoid being served buffered images, but for strainwave mounts it is not great.