Hi all, I’m a bit puzzled regarding parking the WD-20 mount since I’ve been using 20.22W. The mount will park, but upon power-up, it does not remember it was parked before power down. Instead, it will startup up as if it was homed before power down (and thus lost the model). My mount is used in a permanent observatory, it’s HOME position equals it’s PARK position. The mount is controlled perfectly fine with StellarmateOS on raspberry pi 5. I tried to park using HC as well as StellarmateOS, but they behave similar in loosing park position. In 20.21W parking works without issues. Any ideas to tryout will be welcome.
Hi,
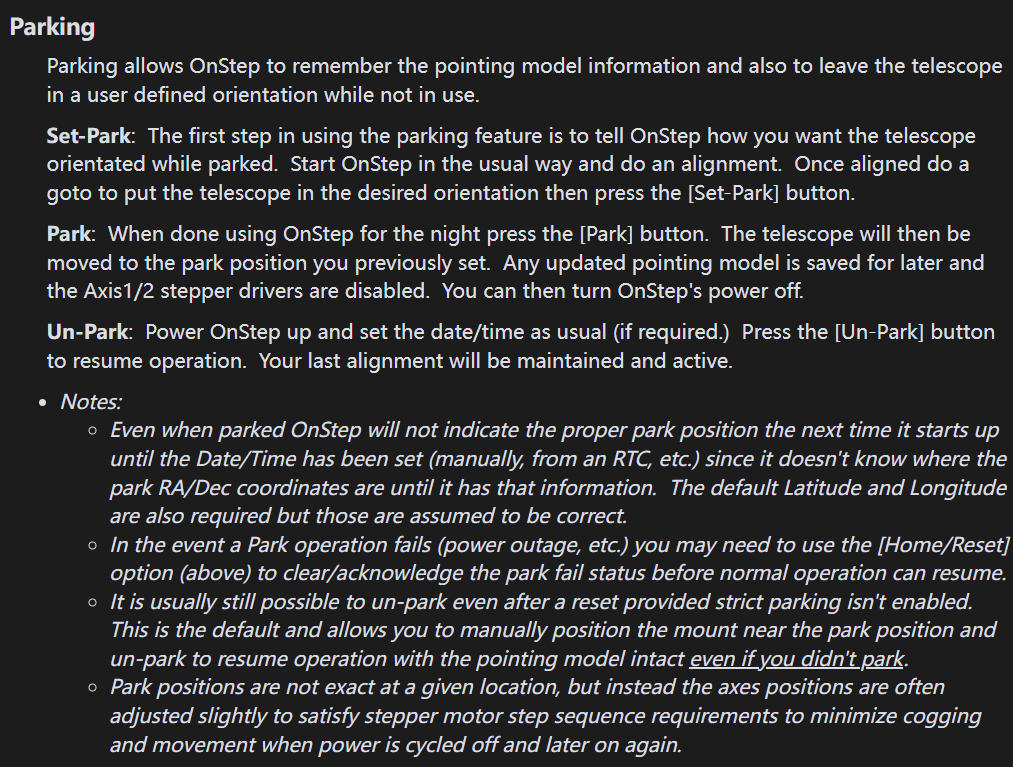
For park feature, it’s critical to set/update Time/Date first once mount powering on. To park and unpark the mount, the mount need time to be updated, as park feature rely on the coordinates systems.
Default park position will be same as Home position, you can customize other park positions by performing Set Park feature, this can be done via Hand controller or Set Park button on INDI panel of StellarMate.
And it’s always important to ensure mount has a correct coordinates. Mount rely on home sensor to return mount to home. This is normal operation to return mount to home before start a sequence.
If you intend to use park feature to set mount to other position rather than home position when operation ended. You need to use the Set Park to define that position first, not Park, as Park is to move the mount to the position been Set Park.
Once you have defined that customized park position then you can use Park to move the mount to that position. It’s always important to sync the time/date before doing park related features. Detail can be seen refer to OnStep wiki:
WarpAstron Support Team
1 Like
Are these things not set automatically by the GPS? (after a few minutes when it’s found the satellites and stabilized).
Yes, but my mount got its date, time and location from KStars upon startup.
Thanks for your comments. Actually I configured KStars to update the mount with date, time and location from the raspberry pi. When the mount starts up from park state, it will lost the park state as soon as KStars starts up. I fixed this by letting the mount updating KStars with date, time and location from the mount, as received by the mount’s build-in GPS module. With this configuration parking and unparking works as expected. Since I use the mount in a permanent observatory (in which the raspberry pi will have date and time from a network connection while using a fixed location) as well as when travelling (and occasionally without a network connection), this will likely be a solid solution for both situations.